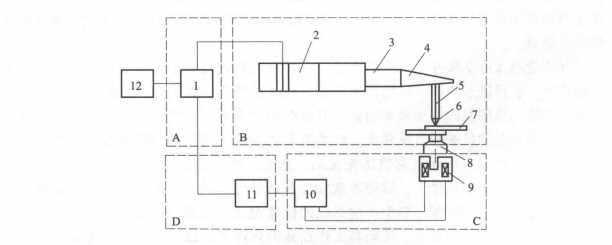
超声波点焊机的典型结构组成如图1所示,由超声波发生器(A)、声学系统(B)、加压机构(C)、程控装置(D)等四部分组成。
1—超声波发生器;2—换能器;3—传振杆;4—聚能器;5—耦合杆;6—上声极;7—工件;8—下声极;9—电磁加压装置;10—控制加压电源;11一程控器;12—电源
(1) 超声波发生器
超声波发生器用来将工频(50Hz)电流变换成超声频率(15~60kHz)的振荡电流,并通过输出变压器与换能器相匹配。
超声波发生器目前有电子管放大式、晶体管放大式、晶闸管逆变式及晶体管逆变式等多种电路形式。其中电子管式效率低,仅为30%~45%,已经被晶体管放大式等所替代。目前应用最广的是晶体管放大式发生器,在超声波发生器作为焊接应用时,频率的自动跟踪是一个必备的性能。由于焊接过程随时会发生负载的改变以及声学系统自振频率的变化,为确保焊接质量的稳定,利用取自负载的反馈信号,构成发生器的自激状态,以确保自动跟踪和最优的负载匹配。
(2)声学系统
超声波焊机的声学系统是整机的心脏,包括换能器、传振杆、聚能器、耦合杆和上、下声极组成。
①换能器用来将超声波发生器的电磁振荡转成相同频率的机械振动。常用的换能器有压电式及磁致伸缩式两种。压电换能器的最主要优点是效率高和使用方便,一般效率可达80%~90%,基于逆压电效应。石英、错酸铅、错钛酸铅等压电晶体,在一定的结晶面受到压力或拉力时将会出现电荷,称之为压电效应,反之,当在压电轴方向馈人交变电场时,晶体就沿着一定方向发生同步的伸缩现象,称为逆压电效应。压电换能器的特点是比较脆弱,使用寿命较短。磁致伸缩换能器是依靠磁致伸缩效应而工作。当将镍或铁铝合金等材料置于磁场中时,作为单元铁磁体的磁畴将发生有序化运动,并引起材料在长度上的伸缩现象,即磁致伸缩现象。磁致伸缩换能器是一种半永久性器件,工作稳定可靠,但由于效率仅为20%~40%,除了特大功率的换能器以及连续工作的大功率缝焊机,因冷却有困难而被采用外,已经被压电式换能器所取代。
②传振杆主要用于高速输出负载、固定系统以及方便实际使用,是与压电式换能器配套的声学主件。传振杆通常选择放大倍数0.8、1、1.25等几种半波长阶梯型杆,由于传振杆主要用来传递振动能量,一般可以选择由45钢或30CrMnSi低合金钢或超硬铝合金制成。
③聚能器又称超声波变幅杆,在声学系统中起着放大换能器输出的振幅并耦合传输到工件的作用。各种锥形杆都可以用作聚能器,设计各种聚能器的共同目标是使聚能器的自振频率能与换能器的推动频率谐振,并在结构上考虑合适的放大倍数、低的传输损耗以及自身具备的足够的机械强度。指数锥聚能器由于可使用较高的放大系数,工作稳定,结构强度高,因而常常被优先选用。此外,聚能器作为声学系统的一个组件,最终要被固定在某一装置上,以便实现加压及运转等,从实用方面考虑,在磁致伸缩型的声学系统中往往将固定整个声学系统的位置设计在聚能器的波节点上。某些压电式声学系统也有类似的设计。聚能器工作在疲劳条件下,设计时应重点考虑结构的强度,特别是声学系统各个组元的连接部位,更是需要特别注意。材料的抗疲劳强度及减少振动时的内耗是选择聚能器材料的主要依据,目前常用的材料有45钢、30CrMnSi、超硬铝合金、蒙乃尔合金以及钛合金等。
④耦合杆用来改变振动形式,一般是将聚能器输出的纵向振动改变为弯曲振动,当声学系统含有耦合杆时,振动能量的传输及耦合功能就都由耦合杆来承担。除了应根据谐振条件来设计耦合杆的自振频率外,还可以通过波长数的选择来调整振动振幅的分布,以获得最优的工艺效果。耦合杆在结构上非常简单,通常都是一个圆柱杆,但其工作状态较为复杂,设计时需要考虑弯曲振动时的自身转动惯量及其剪切变形的影响,而且约束条件也很复杂,因而实际设计时要比聚能器复杂。一般选择与聚能器相当的材料制作耦合杆,两者用钎焊的方法连接起来。
⑤声极(超声波焊头、焊座):超声波焊机中直接与工件接触的声学部件称为上、下声极。对于点焊机来说,可以用各种方法与聚能器或耦合杆相连接,而缝焊机的上下声极可以就是一对滚盘,至于塑料用焊机的上声极,其形状更是随零件形状而改变。但是,无论是哪一种声极,在设计中的基本问题仍然是自振频率的设计,显然,上声极有可能成为最复杂的一个声学元件。
(3)加压机构
向工件施加静压力的加压机构是形成焊接接头的必要条件,目前主要有液压、气压、电磁加压及自重加压等几种。其中,液压方式冲击力小,主要用于大功率焊机,小功率焊机多采用电磁加压或自重加压方式,这种方式可以匹配较快的控制程序。实际使用中加压机构还可能包括工件的夹持机构。超声波焊接时防止焊件滑动、更有效地传输振动能量往往是十分重要的,在焊薄件时,应尽量减小振幅,因为如果焊头的滑动大于工件间的滑动,那么会浪费掉大量能量。